Interactive Cyber-Physical Human: Generating Contact-Rich Whole-Body Motions
[ad_1]
The new platform utilizes human measurement details, musculoskeletal assessment, and device studying, to enable the enhancement of humanoid robots and robotic simulations.

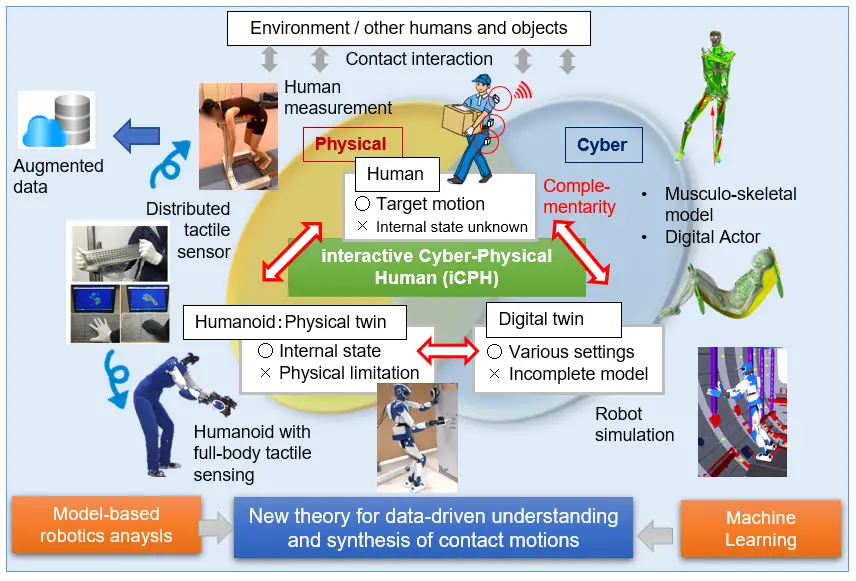
iCPH makes use of human measurement information, musculoskeletal assessment, and equipment learning, enabling complementary humanoid robots (bodily twins) and robotic simulations (digital twins) to realize, predict, and synthesize human-like contact motions. Image credit: Eiichi Yoshida from the Tokyo University of Science
Doing human-like motions that require many contacts is challenging for robots. In this regard, a researcher from the Tokyo College Science has envisioned an interactive cyber-actual physical human (iCPH) platform with complementary humanoid (physical twin) and simulation (digital twin) factors.
iCPH combines human measurement data, musculoskeletal assessment, and machine discovering for info selection and augmentation. As a result, iCPH can fully grasp, predict, and synthesize entire-entire body call motions.
Individuals the natural way complete many intricate tasks. These include things like sitting down, picking a little something up from a desk, and pushing a cart. These functions include various movements and demand a number of contacts, which will make it challenging to plan robots to complete them.
Just lately, Professor Eiichi Yoshida of the Tokyo University of Science has place ahead the notion of an interactive cyber-actual physical human (iCPH) system to tackle this problem. It can aid recognize and crank out human-like systems with speak to-abundant complete-human body motions. His perform was revealed in Frontiers in Robotics and AI.
Prof. Yoshida briefly describes the fundamentals of the system. “As the title implies, iCPH brings together actual physical and cyber aspects to seize human motions. Whilst a humanoid robotic functions as a physical twin of a human, a digital twin exists as a simulated human or robotic in cyberspace. The latter is modeled through strategies these kinds of as musculoskeletal and robotic examination. The two twins enhance each other.”
This analysis raises a number of vital inquiries. How can humanoids mimic human motion? How can robots understand and simulate human behaviors? And how can robots interact with human beings effortlessly and by natural means? Prof. Yoshida addresses them in this framework.
Very first, in the iCPH framework, human movement is measured by quantifying the condition, construction, angle, velocity, and drive related with the movement of numerous human body areas. In addition, the sequence of contacts created by a human is also recorded.
As a outcome, the framework makes it possible for the generic description of many motions through differential equations and the era of a contact movement network on which a humanoid can act.
Next, the digital twin learns this community by way of product-based mostly and machine finding out techniques. They are bridged collectively by the analytical gradient computation technique. Continual discovering teaches the robotic simulation how to accomplish the call sequence.
3rd, iCPH enriches the call movement network via details augmentation and applies the vector quantization procedure. It can help extract the symbols expressing the language of contact motion. So, the system lets the technology make contact with motion in inexperienced cases. In other words, robots can investigate unknown environments and interact with individuals by using easy motions involving quite a few contacts.
In outcome, the author places forward a few challenges. These pertain to the basic descriptors, continuous studying, and symbolization of make contact with motion. Navigating them is necessary for knowing iCPH. The moment designed, the novel system will have a lot of purposes.
“The info from iCPH will be manufactured community and deployed to authentic-life issues for resolving social and industrial challenges. Humanoid robots can launch people from lots of jobs involving extreme burdens and improve their protection, these kinds of as lifting major objects and operating in harmful environments. iCPH can also be used to check responsibilities executed by human beings and aid reduce perform-relevant ailments. At last, humanoids can be remotely controlled by individuals by their digital twins, which will enable the humanoids to undertake significant products set up and item transportation,” says Prof. Yoshida, on the purposes of iCPH.
Applying the iCPH as ground zero and with the aid of collaborations from unique research communities, like robotics, synthetic intelligence, neuroscience, and biomechanics, a upcoming with humanoid robots is not far.
Source: Tokyo University of Science
[ad_2]
Resource connection In recent years, there has been an increased demand for artificially intelligent (AI) robots to assist humans in their daily tasks. A new research has revealed the development of a new technology that bridges the gap between AI robots and human capabilities. This technology is called “Interactive Cyber-Physical Human” (ICPH).
ICPH is a novel platform that consists of a cyber-physical body supported by high-resolution sensors and motors. The cyber-physical body uses AI algorithms to generate contact-rich motion in 3-D physical space. It can use this motion to perform physical activities or interact with humans at a close distance.
ICPH has two main components: a robotic arm and a vision system. The arm performs various manipulative tasks such as pushing, pulling, gripping, and grasping. The vision system can detect nearby objects and obstacles in both the visible and infrared spectra. The combination of the vision system and the robotic arm enables ICPH to interact with its environment in real-time.
ICPH was designed to perform complex whole-body movements in an environment with limited computational resources. For example, ICPH can move its body in a very human-like way, allowing it to share objects, touch surfaces or even embrace a person. Additionally, it can interact with other humans and its environment in a much more expressive way.
The main advantage of ICPH is its ability to generate contact-rich motion, which is similar to human motion. This allows for more natural interactions between people and machines, making communication more natural and efficient.
In conclusion, ICPH shows great potential to become an integral part of modern-day robotics. Its ability to generate contact-rich motion could be used in various applications such as healthcare, education, human-robot interaction and even household chores. In the near future, ICPH could revolutionize the way robots interact with humans.